??i m?t v?i v?n ?? ng??ng cao và chi phí cao c?a n?n t?ng m? hình hóa và ?ào t?o robot, Yueqing Technology ?? t?n d?ng l?i th? k? thu?t trong ngành v? ph?n m?m robot ?? phát hành m?-?un m? hình hóa robot iRobotCAM d?a trên n?n t?ng h?t nhan hình h?c 3D.
- V?i kh? n?ng t?o m? hình c?a iRobotCAM và kh? n?ng c?a c?ng c? v?t ly t? phát tri?n, iRobotCAM có th? nhanh chóng t?o và qu?n ly các m? hình robot và m? ph?ng hành vi v?t ly.
- V?i giao di?n nh?p và xu?t URDF m? r?ng, ti?n ích b? sung iRobotCAM k?t n?i v?i robot ROS, cho phép ng??i dùng k?t n?i m? hình hóa robot và m? ph?ng robot ?? ?ào t?o m? hình v?t ly robot hi?u qu? h?n.
Sau ?ay l?y ví d? v? robot c?ng nghi?p ??n gi?n nh?t ?? gi?i thích r? h?n v? cách s? d?ng iRobotCAM ?? th?c hi?n m? hình hóa và ?ào t?o robot:
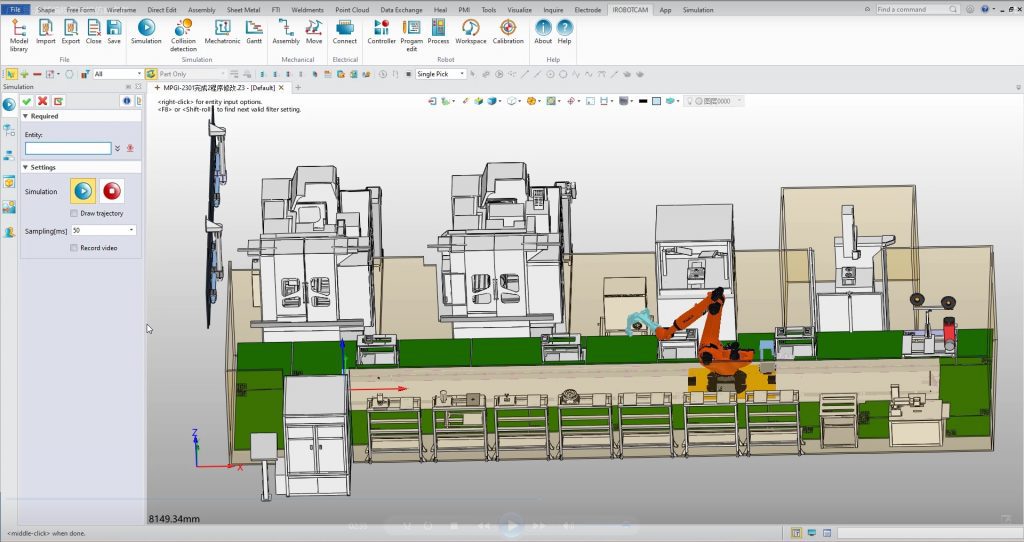
- M? hình c?nh 3D k? thu?t s?
- S? d?ng ch?c n?ng t?o m? hình 3D, iRobotCAM có th? xay d?ng các m? hình 3D ph?c t?p và hoàn thi?n m? hình c?nh k? thu?t s?.
- H? tr? nh?p iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid và các ??nh d?ng 3D khác, nh?m tái s? d?ng các m? hình 3D hi?n có, nang cao hi?u qu? xay d?ng c?nh k? thu?t s? c?a robot.
- Th? vi?n thi?t k? c? ?i?n t? và robot
- Thi?t l?p m?i tr??ng d? li?u c?m bi?n: h? tr? các h? th?ng tín hi?u PLC bao g?m Siemens, Mitsubishi, Inovance và các th??ng hi?u khác, ??ng th?i h? tr? tùy ch?nh nhi?u thi?t b? truy c?p tín hi?u h?n
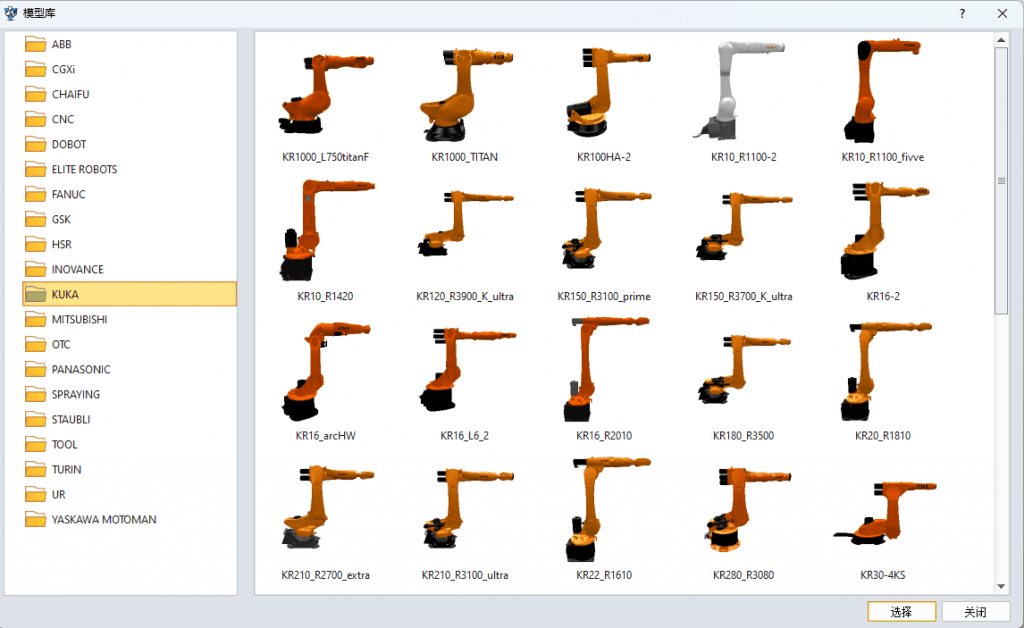
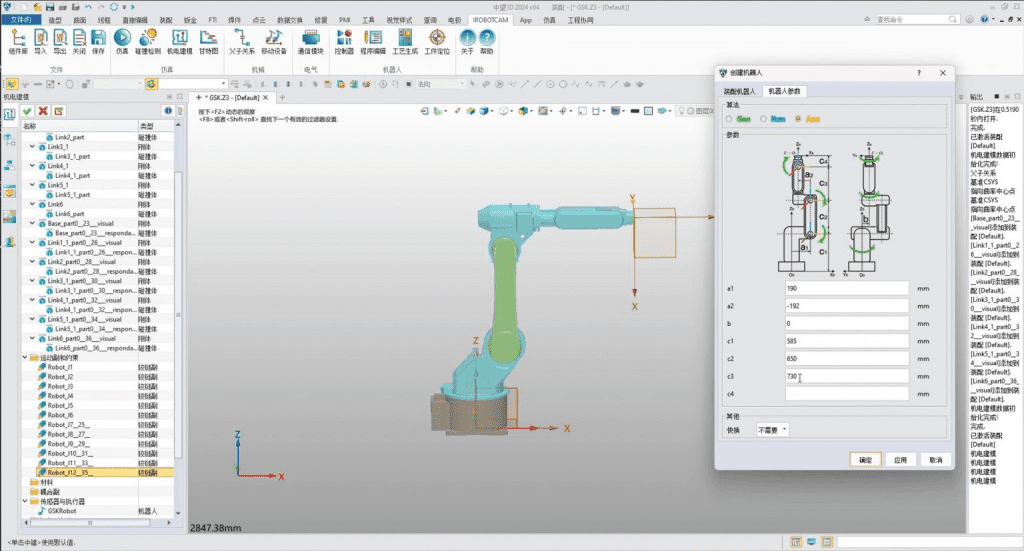
- Thi?t l?p th? vi?n robot: ??i v?i robot c?ng nghi?p, b?n có th? s? d?ng các th? vi?n robot tích h?p s?n bao g?m ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO và Turing ?? thi?t l?p các m? hình m? ph?ng robot ho?c thi?t l?p th? vi?n robot c?a riêng b?n th?ng qua các ch?c n?ng tùy ch?nh robot. ??i v?i robot ng??i ho?c robot thép, th?ng tin chi ti?t v? kh?p n?i c?a các b? ph?n t??ng ?ng có th? ???c thi?t l?p khi c?n và ??nh ngh?a kh?p n?i t?ng th?, phát hi?n va ch?m, v.v. có th? ???c hình thành ?? t?o thành th? vi?n robot hình ng??i ho?c robot có bánh xe c? th?.
- ?ào t?o robot
- Thi?t l?p m? hình l?p k? ho?ch qu? ??o robot: h? tr? m? ph?ng giao ti?p IO ?a máy, ??ng b? hóa ?a robot và l?p k? ho?ch liên k?t ?a tr?c robot;
- ?ào t?o các m? hình v?t ly ???c ?ào t?o b?i robot: H? tr? m? ph?ng các ??c ?i?m v?t ly b?ng cách s? d?ng c?ng c? v?t ly riêng, bao g?m các yêu c?u tránh ch??ng ng?i v?t, phan tích va ch?m và các m? hình d? li?u khác, ??ng th?i h? tr? m? r?ng giao di?n c?a bên th? ba ?? h? tr? các thu?t toán ?ào t?o robot trong các tình hu?ng c? th?.
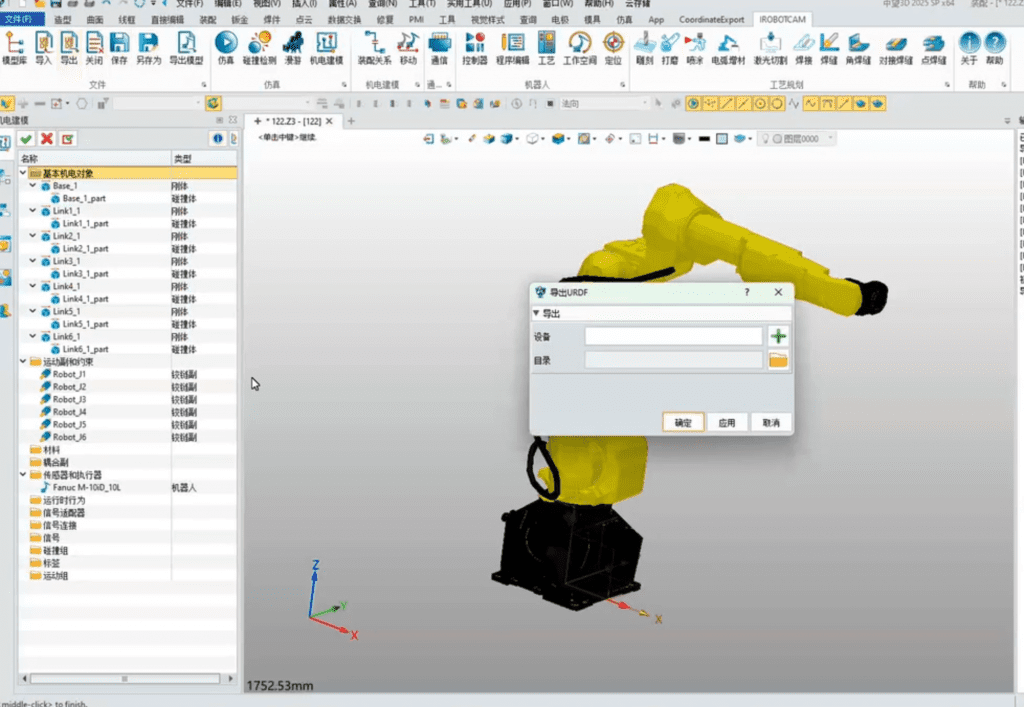
- K?t n?i d? li?u v?i robot ROS ?? ??t ???c kh? n?ng g? l?i chung
- M? hình t?i ?u hóa robot ???c hoàn thi?n b?i iRobotCAM có th? ???c xu?t sang URDF ?? m? ph?ng và th?c hi?n thêm các robot ROS
- V?i ch?c n?ng nh?p URDF, m? hình c? s? robot có th? ???c nh?p vào iRobotCAM và m?i tr??ng d? li?u robot có th? ???c s?a ??i và ?ào t?o trong iRobotCAM ?? ?áp ?ng các m?c tiêu thi?t k? c?a m? hình d? li?u robot.
Gi?i thi?u v? C?ng ngh? Yueqing
Yueqing Technology cam k?t xay d?ng n?n t?ng l?p trình ngo?i tuy?n robot iRobotCAM m?, ?ay là gi?i pháp k? thu?t s? tích h?p thi?t k? khái ni?m c? ?i?n c?a day chuy?n s?n xu?t, m? ph?ng l?p trình x? ly robot và g? l?i ?o.
Trang web iRobotCAM: m.psfzl.com; Liên h?: cooperation@iRobotCAM.com